한국 최초의 인간형 로봇 ‘휴보(HUBO)’가 세계 최고 재난대응로봇으로 거듭났다. 전 세계에서 덤벼든 24대의 로봇과 경합을 벌여 가장 실력이 뛰어난 로봇으로 인정받은 것이다.
KAIST(한국과학기술원) 휴머노이드로봇연구센터(휴보센터)가 6월 5~6일(이하 현지시간) 양일간 미국 캘리포니아 주 퍼모나 시의 복합시설 페어플렉스(Fairflex)에서 열린 ‘다르파 로보틱스 챌린지(DRC)’에서 우승을 차지했다. 이 대회는 미국 국방부 산하 방위고등연구계획국(DARPA)이 주최하는 재난대응로봇 경연으로, 완성도 높은 로봇 제작과 제어 기술을 갖춘 세계 최고 로봇개발팀이 참가해 ‘로봇올림픽’으로 불린다.
진화가 이룬 쾌거
휴보센터와 로봇벤처 ‘레인보우’가 주축이 돼 출전한 ‘팀카이스트(Team KAIST)’는 6월 6일 최종 결선 경기에서 8단계 수행임무(8점 만점)를 44분 28초 만에 완벽히 수행해 1위를 차지했다. 우승자에게 주어지는 200만 달러(약 22억 원) 상금은 물론, 세계 최고 재난대응로봇이란 명예까지 얻었다. 이 대회를 계기로 세계 각국 로봇연구팀들이 한국 연구진을 바라보는 눈빛이 크게 변했다. 미국 최고 로봇연구팀 중 하나로 꼽히는 ‘IHMC 로보틱스’의 한 연구원은 휴보팀을 찾아와 “우리 로봇은 너무 크고 무거운데 휴보는 작고 강력해서 좋다”며 휴보 옆에서 기념사진을 찍고 가기도 했다.
아직 실용화되지는 않았지만 재난대응 또는 인명구조용 로봇은 인간형 로봇이 될 것이라는 전망이 많다. 재난 현장에 사람 대신 들어가 기계장치를 움직이려면 사람처럼 생겨야 하기 때문이다. DRC도 일본 후쿠시마 원자력발전소(원전) 사고를 계기로 로봇이 인간을 대신해 극한의 재난 현장에 들어가 작업할 수 있게 하자는 취지에서 만들어진 대회다.
 이번 DRC의 미션은 모두 8개. 먼저 차량에 태워 출발시킨 로봇이 △직접 운전해서 사고 현장까지 들어가고, 차를 정차한 다음 사람 도움 없이 자기 손과 발로 △하차에 성공해야 한다. 말은 쉽지만 이 대회가 열리기 전까지는 차에서 내리는 기능을 갖춘 로봇이 없었다. 그다음 △문을 열고 가상의 오염된 실내로 들어가 △냉각수 밸브를 잠근 다음, 주위에 놓아둔 전동공구를 들어 △벽에 구멍을 내고, 그날 아침에 주어진 △깜짝 과제(레버 당기기, 전선 연결하기, 벽 스위치 누르기 등)를 수행한 후 △잔해를 돌파해 건물을 빠져 나와, 마지막으로 △계단을 성큼성큼 걸어 올라가야 한다.
이번 DRC의 미션은 모두 8개. 먼저 차량에 태워 출발시킨 로봇이 △직접 운전해서 사고 현장까지 들어가고, 차를 정차한 다음 사람 도움 없이 자기 손과 발로 △하차에 성공해야 한다. 말은 쉽지만 이 대회가 열리기 전까지는 차에서 내리는 기능을 갖춘 로봇이 없었다. 그다음 △문을 열고 가상의 오염된 실내로 들어가 △냉각수 밸브를 잠근 다음, 주위에 놓아둔 전동공구를 들어 △벽에 구멍을 내고, 그날 아침에 주어진 △깜짝 과제(레버 당기기, 전선 연결하기, 벽 스위치 누르기 등)를 수행한 후 △잔해를 돌파해 건물을 빠져 나와, 마지막으로 △계단을 성큼성큼 걸어 올라가야 한다.
이 대회가 처음 기획된 당시 ‘로봇이 이런 일을 다 해내는 건 100년 후에나 가능할 것’이라는 평가가 나올 만큼 현대 과학기술로도 어려운 도전이다. 그러나 3년 사이 비록 제한적이긴 하지만 로봇이 사람 대신 이 모든 일을 해내는 데 성공한 것이다. 이 때문에 이번 DRC를 놓고 ‘인간형 로봇기술의 혁명을 이뤘다’는 평가가 나온다.
이러한 휴보의 성공을 가져온 건 탁월한 로봇기술이다. 먼저 로봇 체구를 크게 키운 게 주효했다. 2004년 이후 휴보의 키는 버전이 바뀌어도 줄곧 125cm였다. 하지만 2013년 12월 미국 마이애미 인근 소도시 홈스테드에서 열린 DRC 1차 예선 대회에 출전한 휴보의 키는 145cm로 20cm 이상 커졌다. 일을 잘하려면 기본 체격이 필요하기 때문이다. 그리고 이번에 우승을 차지한 DRC 파이널대회에선 이 로봇을 다시 한 번 개조해 168cm까지 키웠다.
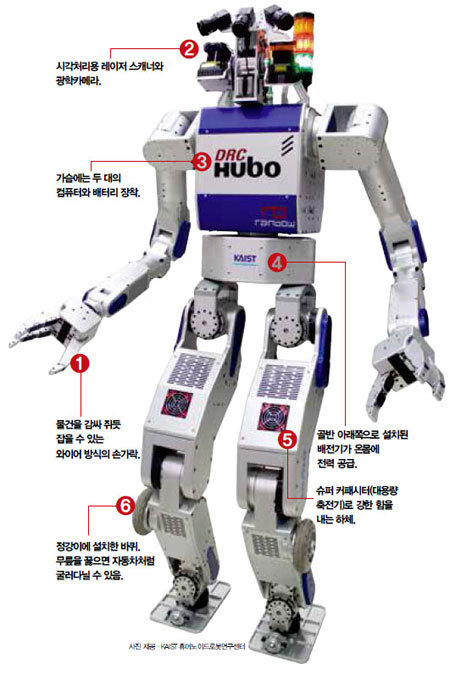
오준호 휴보센터장(KAIST 기계공학과 교수)은 “로봇의 하체 힘이 좋아야 걸을 때 안정성이 생긴다고 판단해 다리에 ‘슈퍼 커패시터(대용량 축전기)’를 부착했다” 정강이와 발밑에 바퀴도 달았다. 두 발로 걷다 무릎을 꿇고 앉으면 자동차처럼 바퀴로 움직일 수 있도록 ‘변신기능’을 추가한 것이다.
튼튼한 기본기에 ‘변신기능’ 덧붙여
이 덕에 휴보는 차별화된 전략을 짜는 것이 가능했다. 두 발로 걸어야 할 때는 언제든 일어서서 사람처럼 두 손으로 작업하고, 먼 거리를 안정적으로 이동할 때는 바퀴를 이용했다.
시각처리 능력이 크게 좋아진 점도 휴보의 자랑거리다. 이번 대회에 출전한 휴보의 머리에는 레이저 스캐너와 광학카메라를 달아 날이 흐리든, 햇빛이 강하든 시야에 문제가 생기지 않게 했다. 여기에 권인소 KAIST 전기및전자공학부 교수팀이 개발한 시각처리 프로그램을 이식해 휴보가 카메라와 레이저로 주변을 촬영하면서도 데이터를 더욱 정확하게 처리할 수 있게 했다.
휴보가 세계 최고 로봇에 등극한 또 하나의 힘은 반복 연습이다. 연구팀은 새로 개발한 로봇의 성능을 실험하고 DRC 맞춤형 전략을 짜기 위해 한국에서 100차례 이상 연습을 거듭했다. 또 환경이 달라질 것에 대비해 현지에서 3주 이상 전지훈련을 거쳤고, 시합 전날 오전 6시까지 달라진 대회장 환경에 맞춰 로봇 제어 연습도 반복했다.
‘휴보 아빠’로 불리는 오준호 교수는 이번 대회를 통해 휴보가 기술적인 진보를 한층 더 크게 이룰 계기를 마련하게 됐다고 보고 있다. 지금의 휴보를 완성형으로 보기엔 이르다는 것이다. 그는 “로봇 몸체 등은 일본이나 미국이 더 좋은 경우도 많다.
1등을 했다고 휴보가 세계에서 가장 성능이 뛰어난 로봇이라고 단정하긴 어렵다”면서 “로봇이 실제로 재난대응, 인명구조 활동에 투입되려면 더 큰 기술적 진보가 필요한 만큼 연구개발을 꾸준히 계속해나갈 예정”이라고 말했다. 휴보팀은 이번에 받은 상금 역시 새 로봇을 개발하는 연구비로 모두 사용할 예정이다.

KAIST(한국과학기술원) 휴머노이드로봇연구센터(휴보센터)가 6월 5~6일(이하 현지시간) 양일간 미국 캘리포니아 주 퍼모나 시의 복합시설 페어플렉스(Fairflex)에서 열린 ‘다르파 로보틱스 챌린지(DRC)’에서 우승을 차지했다. 이 대회는 미국 국방부 산하 방위고등연구계획국(DARPA)이 주최하는 재난대응로봇 경연으로, 완성도 높은 로봇 제작과 제어 기술을 갖춘 세계 최고 로봇개발팀이 참가해 ‘로봇올림픽’으로 불린다.
진화가 이룬 쾌거
휴보센터와 로봇벤처 ‘레인보우’가 주축이 돼 출전한 ‘팀카이스트(Team KAIST)’는 6월 6일 최종 결선 경기에서 8단계 수행임무(8점 만점)를 44분 28초 만에 완벽히 수행해 1위를 차지했다. 우승자에게 주어지는 200만 달러(약 22억 원) 상금은 물론, 세계 최고 재난대응로봇이란 명예까지 얻었다. 이 대회를 계기로 세계 각국 로봇연구팀들이 한국 연구진을 바라보는 눈빛이 크게 변했다. 미국 최고 로봇연구팀 중 하나로 꼽히는 ‘IHMC 로보틱스’의 한 연구원은 휴보팀을 찾아와 “우리 로봇은 너무 크고 무거운데 휴보는 작고 강력해서 좋다”며 휴보 옆에서 기념사진을 찍고 가기도 했다.
아직 실용화되지는 않았지만 재난대응 또는 인명구조용 로봇은 인간형 로봇이 될 것이라는 전망이 많다. 재난 현장에 사람 대신 들어가 기계장치를 움직이려면 사람처럼 생겨야 하기 때문이다. DRC도 일본 후쿠시마 원자력발전소(원전) 사고를 계기로 로봇이 인간을 대신해 극한의 재난 현장에 들어가 작업할 수 있게 하자는 취지에서 만들어진 대회다.
이 대회가 처음 기획된 당시 ‘로봇이 이런 일을 다 해내는 건 100년 후에나 가능할 것’이라는 평가가 나올 만큼 현대 과학기술로도 어려운 도전이다. 그러나 3년 사이 비록 제한적이긴 하지만 로봇이 사람 대신 이 모든 일을 해내는 데 성공한 것이다. 이 때문에 이번 DRC를 놓고 ‘인간형 로봇기술의 혁명을 이뤘다’는 평가가 나온다.
이러한 휴보의 성공을 가져온 건 탁월한 로봇기술이다. 먼저 로봇 체구를 크게 키운 게 주효했다. 2004년 이후 휴보의 키는 버전이 바뀌어도 줄곧 125cm였다. 하지만 2013년 12월 미국 마이애미 인근 소도시 홈스테드에서 열린 DRC 1차 예선 대회에 출전한 휴보의 키는 145cm로 20cm 이상 커졌다. 일을 잘하려면 기본 체격이 필요하기 때문이다. 그리고 이번에 우승을 차지한 DRC 파이널대회에선 이 로봇을 다시 한 번 개조해 168cm까지 키웠다.
오준호 휴보센터장(KAIST 기계공학과 교수)은 “로봇의 하체 힘이 좋아야 걸을 때 안정성이 생긴다고 판단해 다리에 ‘슈퍼 커패시터(대용량 축전기)’를 부착했다” 정강이와 발밑에 바퀴도 달았다. 두 발로 걷다 무릎을 꿇고 앉으면 자동차처럼 바퀴로 움직일 수 있도록 ‘변신기능’을 추가한 것이다.
튼튼한 기본기에 ‘변신기능’ 덧붙여
이 덕에 휴보는 차별화된 전략을 짜는 것이 가능했다. 두 발로 걸어야 할 때는 언제든 일어서서 사람처럼 두 손으로 작업하고, 먼 거리를 안정적으로 이동할 때는 바퀴를 이용했다.
시각처리 능력이 크게 좋아진 점도 휴보의 자랑거리다. 이번 대회에 출전한 휴보의 머리에는 레이저 스캐너와 광학카메라를 달아 날이 흐리든, 햇빛이 강하든 시야에 문제가 생기지 않게 했다. 여기에 권인소 KAIST 전기및전자공학부 교수팀이 개발한 시각처리 프로그램을 이식해 휴보가 카메라와 레이저로 주변을 촬영하면서도 데이터를 더욱 정확하게 처리할 수 있게 했다.
휴보가 세계 최고 로봇에 등극한 또 하나의 힘은 반복 연습이다. 연구팀은 새로 개발한 로봇의 성능을 실험하고 DRC 맞춤형 전략을 짜기 위해 한국에서 100차례 이상 연습을 거듭했다. 또 환경이 달라질 것에 대비해 현지에서 3주 이상 전지훈련을 거쳤고, 시합 전날 오전 6시까지 달라진 대회장 환경에 맞춰 로봇 제어 연습도 반복했다.
‘휴보 아빠’로 불리는 오준호 교수는 이번 대회를 통해 휴보가 기술적인 진보를 한층 더 크게 이룰 계기를 마련하게 됐다고 보고 있다. 지금의 휴보를 완성형으로 보기엔 이르다는 것이다. 그는 “로봇 몸체 등은 일본이나 미국이 더 좋은 경우도 많다.
1등을 했다고 휴보가 세계에서 가장 성능이 뛰어난 로봇이라고 단정하긴 어렵다”면서 “로봇이 실제로 재난대응, 인명구조 활동에 투입되려면 더 큰 기술적 진보가 필요한 만큼 연구개발을 꾸준히 계속해나갈 예정”이라고 말했다. 휴보팀은 이번에 받은 상금 역시 새 로봇을 개발하는 연구비로 모두 사용할 예정이다.















